
Hệ thống SAS (System of Active Stability) là công nghệ an toàn tiên tiến độc quyền của Toyota, được trang bị trên nhiều dòng xe nâng nhằm đảm bảo hiệu suất vận hành ổn định, hạn chế lật xe và bảo vệ người lái. Trong bài viết này, chúng tôi sẽ giúp bạn hiểu rõ cấu trúc hệ thống SAS, nguyên lý hoạt động và hướng dẫn tháo lắp các thành phần chính như cảm biến, van điều chỉnh và xi lanh khóa lắc. Bài viết được tổng hợp và dịch lại từ tài liệu chính thức của Xe nâng Toyota.
1. Tổng quan về hệ thống SAS trên xe nâng Toyota
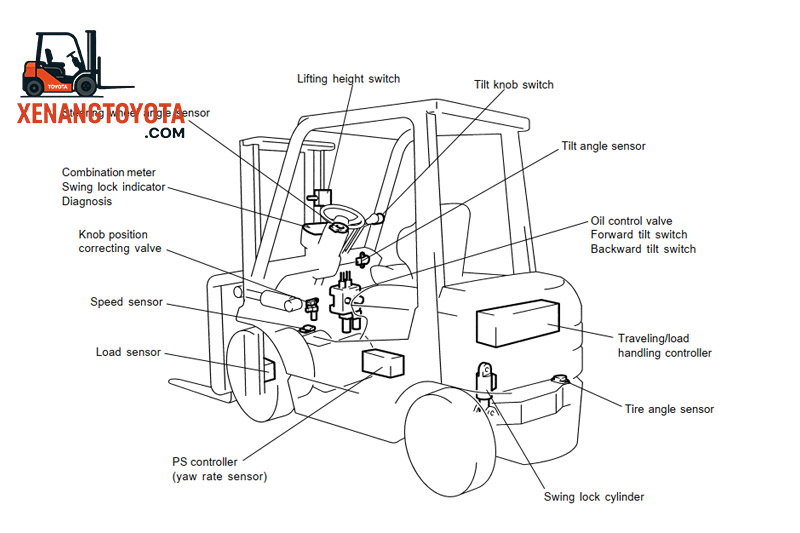
Hệ thống SAS sử dụng hàng loạt cảm biến và cơ cấu chấp hành điện – thủy lực để kiểm soát ổn định khi xe nâng di chuyển, nâng hạ hoặc khi gặp tình huống nguy hiểm. Dữ liệu từ cảm biến được gửi về bộ điều khiển trung tâm PS Controller để điều khiển ba nhóm chính:
-
S: Wheel Swing Control – điều khiển trục sau và xi lanh khóa lắc.
-
T: Mast Tilting Control – điều khiển góc nghiêng khung nâng.
-
K: Knob Position Correction – hiệu chỉnh vị trí vô lăng và cảm biến đánh lái.
Các cảm biến chính của hệ thống SAS:
| Cảm biến | Vị trí lắp đặt | Chức năng |
|---|---|---|
| Speed sensor | Truyền động cầu sau | Nhận biết tốc độ xe |
| Steering wheel angle sensor | Gần vô lăng | Phát hiện góc đánh lái |
| Tire angle sensor | Trục lái | Phát hiện góc bánh xe so với thân xe |
| Tilt angle sensor | Mặt sau khung nâng | Nhận biết độ nghiêng khung nâng |
| Load sensor | Cụm ty nâng | Phát hiện trọng lượng hàng hóa |
| Lifting height switch H | Cột nâng | Phát hiện chiều cao nâng thực tế |
2. Nguyên lý hoạt động của SAS
a. Điều khiển khóa lắc (Swing lock cylinder)
Khi phát hiện nguy cơ nghiêng xe trong quá trình rẽ hoặc nâng hàng cao, bộ điều khiển PS sẽ gửi tín hiệu để xi lanh khóa lắc (Swing lock cylinder) chốt cứng trục sau, tạo thành tam giác ổn định giữa bánh trước và trục sau. Nhờ đó, trọng tâm xe nâng không bị lệch quá xa và giảm thiểu khả năng lật ngang.
b. Điều khiển độ nghiêng khung nâng (Tilt angle control)
Khi nâng hàng ở độ cao lớn hoặc khi xe di chuyển không ổn định, hệ thống SAS sẽ tự động giới hạn góc nghiêng về phía trước của khung nâng nhằm giảm nguy cơ đổ hàng hoặc lật xe về phía trước.
c. Điều chỉnh vị trí tay lái (Knob position correction)
Hệ thống SAS sử dụng cảm biến góc đánh lái và góc bánh xe để đồng bộ hóa hướng đánh lái thực tế với tín hiệu vô lăng, giúp người lái duy trì kiểm soát chính xác trong mọi tình huống.
Đọc thêm:
Hướng dẫn tháo lắp và hiệu chỉnh xi lanh nghiêng xe nâng Toyota 7FB Series
Hướng dẫn kiểm tra, tháo lắp và bảo dưỡng bơm dầu thủy lực xe nâng Toyota 7FB Series
Hướng dẫn đầy đủ về cụm van điều khiển dầu xe nâng Toyota 7FB Series
3. Hướng dẫn tháo lắp và kiểm tra các bộ phận chính
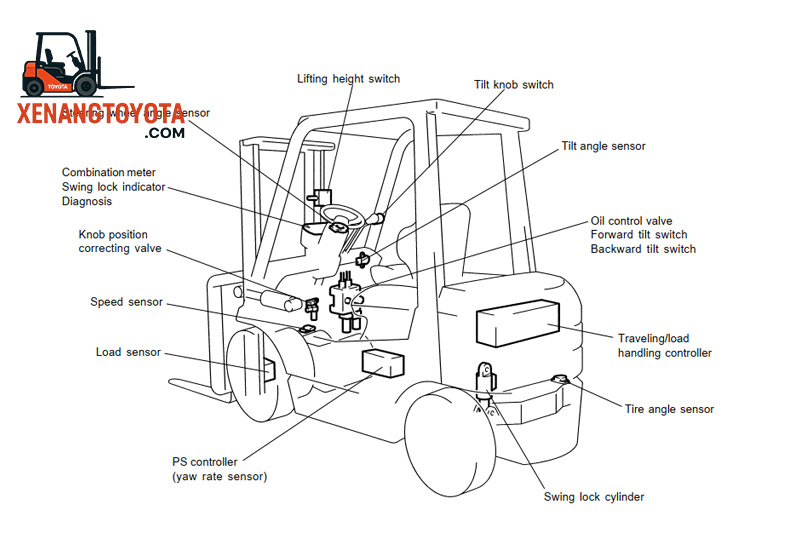
3.1 Cảm biến góc bánh xe (Tire Angle Sensor)
Vị trí: Lắp tại trục lái, phía trên cụm cầu sau.
Tháo lắp:
-
Ngắt kết nối cảm biến.
-
Gỡ bảo vệ giắc và nắp cảm biến.
-
Tháo cảm biến và gioăng.
-
Gỡ cảm biến bushing nếu cần (chỉ khi hư hỏng).
Chú ý: Cần tiến hành matching lại sau khi thay cảm biến hoặc thay nắp.
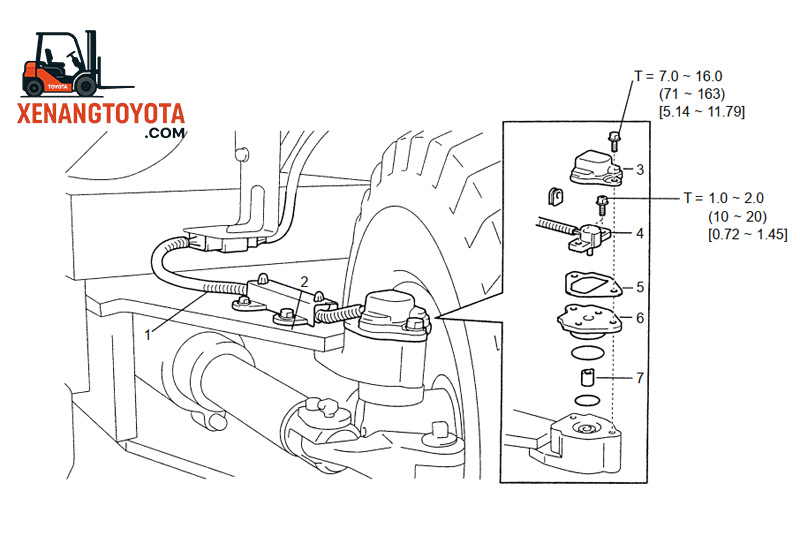
3.2 Xi lanh khóa lắc (Swing Lock Cylinder)
Vị trí: Gắn vào trục sau, nằm bên trái hoặc phải dưới sàn cabin.
Tháo lắp:
-
Ngắt bình ắc quy, kích xe để bánh sau rời khỏi mặt đất.
-
Mở tấm ghế và tấm chắn bên trái.
-
Tháo chốt chặn xi lanh từ hai phía.
-
Rút xi lanh khóa lắc khỏi xe.
Ghi chú: Cần tra mỡ vào điểm xoay sau khi lắp đặt. Tuyệt đối không tháo rời xi lanh để sửa chữa vì sẽ ảnh hưởng đến hiệu suất.
3.3 Cảm biến tốc độ (Speed Sensor)
Vị trí: Gắn trên trục đầu ra hộp số.
Tháo lắp:
-
Rút giắc kết nối.
-
Vặn tháo cảm biến ra khỏi vị trí gắn.
Matching: Không yêu cầu, nhưng kiểm tra lại dây điện khi lắp lại.
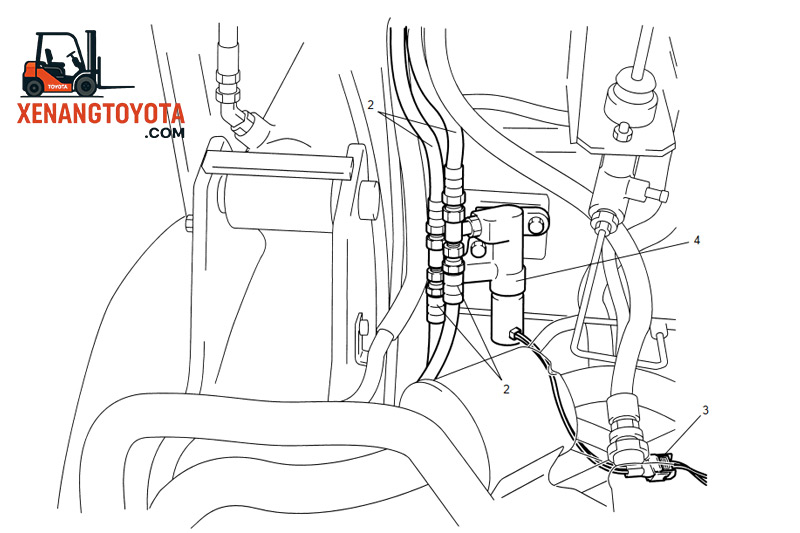
3.4 Van hiệu chỉnh vô lăng (Steering Knob Position Correcting Valve)
Chức năng: Đảm bảo đồng bộ giữa góc xoay vô lăng và bánh xe lái sau.
Tháo lắp:
-
Mở panel dưới chân.
-
Tháo ống dẫn và giắc.
-
Gỡ van ra khỏi cụm khung sắt đỡ.
Cần matching lại sau khi thay thế hoặc hiệu chỉnh.
Đọc thêm:
Hướng dẫn tháo lắp trục trước xe nâng Toyota 7FB Series
Hướng dẫn tháo lắp và bảo dưỡng trục sau xe nâng Toyota 7FB Series
Hướng dẫn tháo lắp cụm vô lăng và trục lái xe nâng Toyota 7FB Series
4. Quy trình hiệu chỉnh (Matching)
Matching là bước thiết lập lại tín hiệu đầu vào cho cảm biến sau khi thay thế hoặc điều chỉnh để hệ thống SAS hoạt động chính xác. Dưới đây là bảng hướng dẫn matching tương ứng với từng thao tác:
| Tác vụ bảo dưỡng | Tilt | Load | Tire | SWG |
|---|---|---|---|---|
| Thay cảm biến nghiêng | ● | |||
| Thay cảm biến trọng tải | ● | |||
| Thay cảm biến góc bánh | ● | |||
| Thay cảm biến swing | ● | |||
| Thay trục nâng | ● | ● | ● | ● |
Ghi chú: Đảm bảo xe ở trạng thái tiêu chuẩn khi thực hiện matching (nền bằng phẳng, trục nâng thẳng đứng, bánh lái giữa vị trí).
5. Lưu ý khi sửa chữa hệ thống SAS
-
Không sử dụng súng hơi để tháo lắp PS Controller vì dễ gây sốc mạch.
-
Tuyệt đối không bật khóa ON khi dây cảm biến chưa được kết nối, tránh tạo lỗi và cần reset mã lỗi theo thứ tự.
-
Khi cần hạ hàng trong tình huống khẩn cấp, có thể thao tác bằng tay thông qua lỗ van swing lock.
-
Tất cả các cảm biến như tilt, load, tire… sau khi tháo ra đều cần matching lại.
6. Cảnh báo khi thay đổi cấu hình xe
Toyota quy định rất rõ ràng về việc cần thực hiện matching lại sau các thay đổi như:
-
Thay trục nâng (mast)
-
Lắp/tháo bộ công tác (attachment)
-
Chuyển xe từ lốp đôi sang lốp đơn hoặc ngược lại
| Nội dung thay đổi | Điều kiện | Các bộ phận cần điều chỉnh |
|---|---|---|
| Thay mast dưới 4500mm | — | Thay mast |
| Mast >4500mm → <2000mm | — | Thay swing, sensor… |
| Thay từ xe lốp đôi → lốp đơn | — | Controller, lock, sensor… |
Kết luận
Hệ thống SAS là giải pháp an toàn chủ động tiên tiến giúp xe nâng Toyota hoạt động ổn định, an toàn trong môi trường nâng hạ cường độ cao. Việc hiểu rõ cấu tạo, nguyên lý và thực hiện đúng quy trình sửa chữa – matching là điều bắt buộc đối với kỹ thuật viên bảo dưỡng xe nâng Toyota.